
Simulatorkuppel
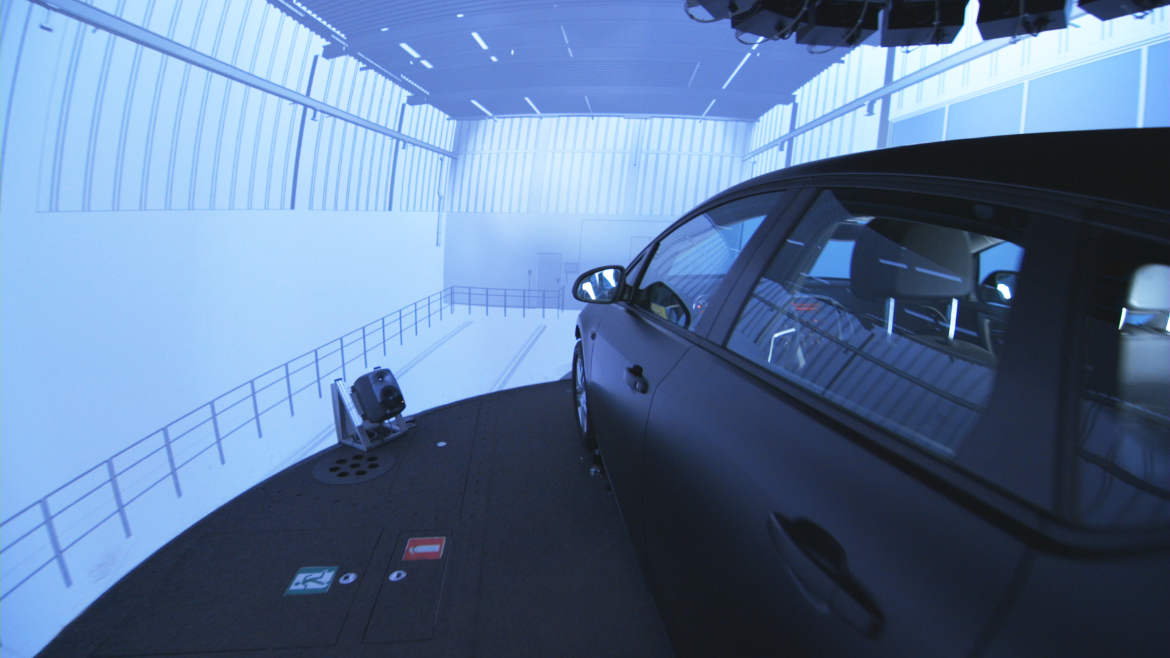
Die Kuppel des Stuttgarter Fahrsimulators bietet mit einem Durchmesser von 5,5 m Platz für ein Fahrzeug-Mockup einer vollständigen PKW-Karosserie. Es können Mockups auf Basis bestehender Serienfahrzeuge oder nicht fahrender Prototypen eingebracht werden. Durch standardisierte Schnittstellen des Mockups für die mechanische Befestigung in der Kuppel, elektrische Versorgung und Datenübertragung können die Fahrzeuge schnell gewechselt werden. Die Fahrgastzelle des Fahrzeugs bleibt komplett erhalten. Bedienelemente des Fahrzeugs funktionieren und werden abhängig von der behandelten Fragestellung mit unterschiedlichen Funktionen belegt. Rückstellkräfte von Bremse und Lenkrad werden durch permanenterregte Synchronservomotoren gestellt.
Zur Beurteilung von Fahrerreaktionen stehen Videoaufzeichnung, Eyetracking und eine Überwachung der Position des Fahrersitzes zur Verfügung. Zeitsynchron dazu werden simulierte Fahrzeugzustände oder Zustände von eingesetzten Assistenzsystemen aufgezeichnet.
12 ESP-LWXT-0,6-Projektoren mit WUXGA-Auflösung ermöglichen ein beeindruckendes Fahrerlebnis. Eine 241°-Frontprojektion mit ca. 10.800 x 1.920 Pixeln wird mit 9 Projektoren erreicht und 3 weitere Projektoren projizieren die entsprechenden Rückspiegelansichten an die Kuppelwand.
Bewegungssystem
Das Bewegungssystem des Stuttgarter Fahrsimulators besteht aus einem Schlittensystem zur Simulation großer linearer Beschleunigungen in Fahrzeuglängs- und -querrichtung sowie einem darauf installierten Hexapoden. Das System verfügt damit über 8 Freiheitsgrade und kann lineare Bewegungen in einem Arbeitsraum von 10 auf 7 m ausführen. Es können Beschleunigungen von bis zu 8 m/s2 erreicht sowie Roll-, Nick- und Gierbewegungen wiedergegeben werden.
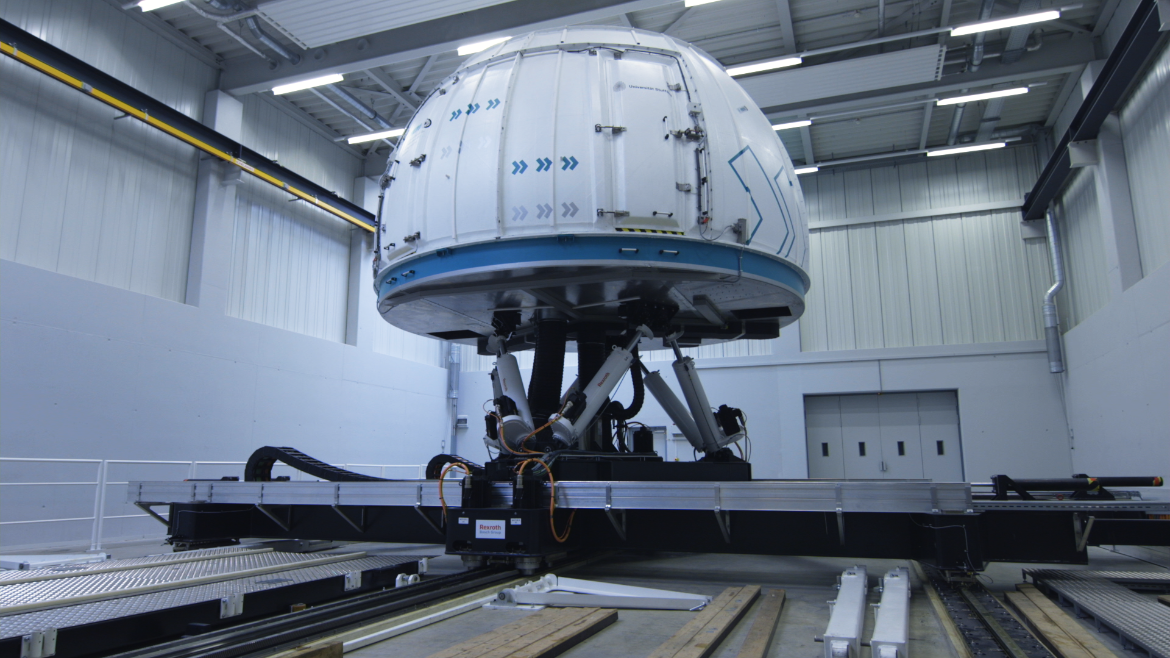
Über den Hexapoden, Schwingerreger an der Fahrzeugkarosserie und ein System aus Lautsprechern wird der komplette Frequenzbereich von in Fahrzeugen auftretenden Schwingungen abgedeckt. Dadurch wird eine realistische Darstellung von Umgebungsgeräuschen und Fahrzeugschwingungen erreicht sowie die gezielte Einflussnahme auf taktil und aural wahrnehmbare Schwingungen von Fahrbahn-/Reifen-, Motor- oder Karosserieanregung.
Zur Abbildung der Fahrgeräusche sind innerhalb der Kuppel und im Mockup verschiedene Lautsprecher montiert. Bei der Verbindung der Lautsprecher kommen digitale Formate wie MADI und AES3 zum Einsatz.
Zum Einbinden bzw. Testen von zum Teil intelligenten Sensoren werden in einem separaten Prüfstand entsprechende Verbindungen bereitgestellt. Dabei können GPS-Signale über eine GPS-Simulation der Firma Spirent sowie der elektronische Horizont im ADASIS-Format bereitgestellt werden. Des Weiteren können Kamerasysteme mit entsprechenden synthetischen Bildern versorgt werden. Zum Testen neuer Sensoranwendungen stehen verschiedene Entwicklungsplattformen zur Verfügung (VRmagic D3, Nvidia PX2, BP-ECS7800, …).
Das Fahrsimulatorsystem kann über eine echtzeitfähige Datenverbindung mit einem Antriebsstrangprüfstand kommunizieren. Bei dieser Kombination aus Driver in the Loop und Hardware-in-the-Loop erhält der Antriebsstrang als Eingaben die Fahrwiderstände aus der Umgebungssimulation und die Fahrereingaben wie die Fahrpedalstellung. Der Fahrer erhält im Gegenzug eine direkte Rückmeldung des Triebstrangverhaltens. Beide Seiten können dadurch von einer Erhöhung der Realitätstiefe profitieren. Mittels eines SQL-Servers werden die Konfigurationsdaten gesichert und erlauben eine Wiederhol- und Übertragbarkeit der durchgeführten Simulation
Direkt zu
Ihr Ansprechpartner

Gerd Baumann
Dr.-Ing.Bereichsleiter AM 1 - Software
[Bild: Gerd Baumann]