
Inhalt
Laufzeit
Das automatisierte und vernetzte Fahren ist einer der spannendsten Forschungsschwerpunkte im Automobilbereich. Es reicht von der Sensorik über Datenverarbeitung und Trajektorienplanung bis hin zur Ansteuerung von Aktuatoren. Hinzu kommt ein ganz neues Maß an erforderlicher Ausfallsicherheit und Prädizierbarkeit von Systemverhalten.

Das Projekt konzentriert sich auf folgende drei Ziele: Erstens: Die Technik des automatisierten, vernetzten und elektrischen Fahrens der Bevölkerung näher bringen, Zweitens: Dialog mit den Menschen: Was erwarten sie? Was befürchten oder erhoffen sie? Und dritter Punkt: Technik erlebbar und anfassbar machen.
Dr.-Ing. Dan Keilhoff, Projektleitung und Lehre automatisiertes und vernetztes Fahren über das Projekt DIAMANT
Trajektorienplanung
Basierend auf den gewonnen Umfelddaten kann eine Trajektorie geplant werden. Diese soll kollisionsfrei und i.d.R. auch optimal im Hinblick auf Zeit, Energieverbrauch oder Komfortansprüche sein. Das IFS beschäftigt sich insbes. mit der energieoptimalen Fahrt von Elektrofahrzeugen.
Sensortechnologien
Das Fahrzeug nimmt seine Umgebung über Sensoren wahr. Hierfür kommen vorrangig Radar- und Lidarsensoren sowie Kamera- und Ultraschallsysteme zum Einsatz. Die Kombination der verschiedenen Technologien erhöht die Zuverlässigkeit. Das IFS beschäftigt sich u.a. mit der Sensorsimulation sowie mit Aspekten der Sensorfusion.
Automatisierte Induktivladepositionierung
Eine besondere Variante der Trajektorienplanung ist die automatisierte Positionierung beim induktiven Laden. Die relative Position der beiden Spulen ist eine der wichtigsten Einflussgrößen im Hinblick auf die Sicherheit und den Wirkungsgrad des Ladevorganges. Das IFS erforscht und entwickelt Algorithmen zur Lokalisierung der Primärspule. Anschließend fährt das Fahrzeug automatisiert auf die optimale Position.
Ausfallsichere Bordnetze
Beim automatisierten Fahren ist nicht mehr zwingend ein Mensch an Bord. Damit fehlt eine Instanz, die bspw. anhand ungewöhnlicher Geräusche einen bevorstehenden Ausfalls erkennt und eingreifen kann. Umso wichtiger ist eine im Vergleich zu heutigen Serienfahrzeugen nochmals deutlich höhere Ausfallsicherheit. Das IFS erforscht Einflüsse auf das Ausfallverhalten von elektrischen Antriebssträngen.
Komfortaspekte beim automatisierten Fahren
Der Komfort der Insassen spielt eine immer größer werdende Rolle. Dabei hängt das Komfortempfinden von verschiedenen Faktoren ab, bspw. Sitzposition und Tätigkeit. Das IFS erforscht am Stuttgarter Fahrsimulator, welche Faktoren den größten Einfluss haben und wir eine komfortorientierte Trajektorie gestaltet sein könnte.
Lastkollektive automatisierter Fahrzeuge
Das Betriebsverhalten eines automatisiert fahrenden Fahrzeugs wird sich spürbar von dem eines manuell gesteuerten Fahrzeugs unterscheiden. Das automatisierte Fahrzeug wird gleichmäßiger fahren und in der Wahl der Betriebspunkte eine geringere Streuung aufweisen. Das führt zu veränderten Belastungssituationen, deren Auswirkungen auf die Zuverlässigkeit am IFS untersucht werden.
Vernetzung
Sowohl automatisierte als auch manuell gesteuerte Fahrzeuge können von einer Vernetzung profitieren. Dies fängt bei Remote-Diagnose an und reicht über Warnmeldungen im Platoon bis hin zur abgestimmten Trajektorienplanung. Das IFS untersucht bspw. prädiktive Diagnoseverfahren für elektrische Antriebsstränge.
Im Rahmen des Projektes wird die Entwicklung einer funktionalen Fahrzeugarchitektur, welche mit der Cloud, der Straßeninfrastruktur und Infobienen vernetzt ist, fokussiert.
Dr.-Ing. Dan Keilhoff, Projektleitung und Lehre automatisiertes und vernetztes Fahren über das Projekt UNICARagil
laufende Forschungsprojekte

UNICARagil.Gefördert durch: Bundesministerium für Bildung und Forschung.
Projektsteckbrief: UNICARagil
Projektlaufzeit: 01.02.2018 bis 31.01.2022
Projektpartner:
Rheinisch-Westfälische Technische Hochschule Aachen - Technische Universität Braunschweig - Technische Universität Darmstadt - Technische Universität München - Universität Ulm - Karlsruher Institut für Technologie - Erweitert wird das Konsortium durch Zulieferer und KMUs aus den Bereichen Antrieb, Simulation, IT-Sicherheit, Embedded Software und Systeme, Kommunikation, Kartierung und Lokalisierung, Logistik und Elektromobilität.
Beteiligte Lehrstühle:
Lehrstuhl Kraftfahrzeugmechatronik: Herr Prof. Dr.-Ing. H.-C. Reuss
Lehrstuhl Kraftfahrwesen Herr Prof. Dr.-Ing. A. Wagner
Projektleiter:
Dr.-Ing. Dan Greiner
Projektinhalte
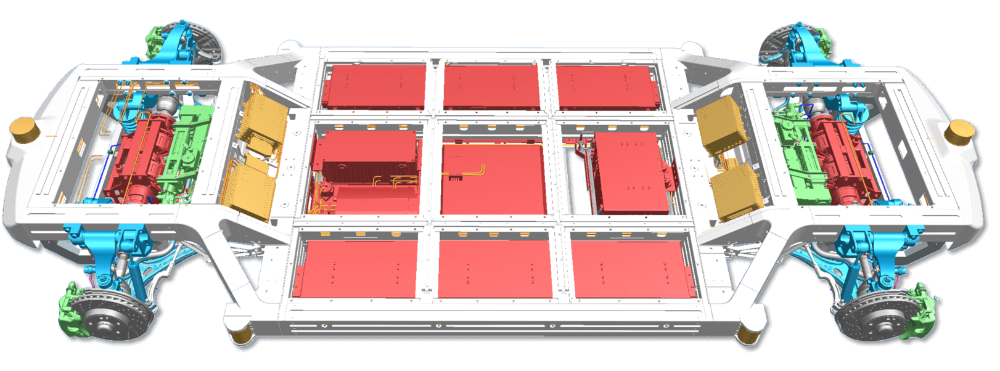
Disruptive modulare Architektur für vielfältige, agile Fahrzeugkonzepte - Ein Paradigmenwechsel auf dem Weg zur automatisierten, elektrischen Mobilität
Auf der Grundlage eines modularen und skalierbaren Fahrzeugkonzeptes, bestehend aus Nutz- und Antriebseinheit, werden vollständig autonom fahrende elektrische Fahrzeuge entwickelt. Es wird eine neue disruptive, modulare und agile Fahrzeugarchitektur als Plattform konzipiert. Im Rahmen des Projektes wird die Entwicklung einer funktionalen Fahrzeugarchitektur, welche mit der Cloud, der Straßeninfrastruktur und Infobienen vernetzt ist, fokussiert. Weitere Schwerpunkte sind die Entwicklung generischer Sensormodule für die Umfelderfassung, eine flexibel erweiterbare, updatefähige und dienstorientierte Software- und Hardwarearchitektur sowie ein hochdynamischer Radnabenantrieb. Darüber hinaus werden auch Safety- und Security-Anforderungen an die Soft- und Hardwarearchitektur bei der Konzeption und Umsetzung berücksichtigt. Hier ist das Ziel, die Gesamtfunktion der Fahrzeuge über eine modulare Absicherung zu gewährleisten.
Arbeitspakete des IFS
- Mechatronische Architektur
- Hardware eines ausfallsicheren Steuergerätes
- Konzeptionierung und Umsetzung eines elektrischen Bordnetztes inkl. des induktiven Ladens
- Konzeptionierung und Umsetzung des thermischen Bordnetzes
Projektförderung
Fördermittelgeber Bundesministerium für Bildung und Forschung
Mehr zum Projekt auch unter
/sites/default/fak7/ifs/aktuelles/news/Konsortialtreffen-UNICARagil-in-Stuttgart/
oder unter
/sites/default/fak7/ifs/aktuelles/news/UNICARagil-Treffen-der-Projektpartner-am-IFS/

MobiLab.Gefördert durch :Ministerium für Wissenschaft, Forschung und Kunst Baden-Württemberg
Projektlaufzeit: Start: 11.2018 - 2035
Projektpartner: ISV, IEH, IEW, IST, IFS, Rektorat
Ansprechpartner
Lehrstuhl Kraftfahrzeugmechatronik
Herr Prof. Dr.-Ing. H.-C. Reuss
Telefon +49 711 685-65743
Projektinhalte: Teilnahme an der Ausschreibung „Emissionsfreier Campus“ vom MWK
Vorstellung der Projekte durch alle 11 teilnehmenden Hochschulen/Unis/FHs war am 04.10.2019.
Projektförderung: MWK (Ministerium für Wissenschaft, Forschung und Kunst Baden-Württemberg)
Weitere Infos auch unter
FlexCar. Gefördert durch: Bundesministerium für Bildung und Forschung
Projektlaufzeit: 07.2018 – 30.06.2023
Projektpartner: Daimler, CSI, Trumpf,Constellium, Robert Bosch GmbH, Siemens, Balluff, DXC, DLR, Universität Stuttgart ( IAT, IFS, IFB, IEW), HdM
Ansprechpartner
Lehrstuhl Kraftfahrzeugmechatronik
Herr Prof. Dr.-Ing. H.-C. Reuss
Telefon +49 711 685-65743
Projektinhalte:
Eine offene Plattform mit offenen Schnittstellen für das update- und upgradefähige Fahrzeug der Zukunft
Die Vision des Verbundprojekts FlexCAR ist es, neu zu definieren, was künftig unter „Plattform“ in Bezug auf Fahrzeuge und Fahrzeugkonzepte verstanden wird: Es geht nicht mehr um die Befähigung eines Unternehmens zur Entwicklung einzelner Komponenten für die spätere Integration durch OEMs, sondern um die Öffnung des Innovations-, Entwicklungs-, Produktions- und Vertriebsprozesses selbst. Zulieferer werden so zu aktiven, im offenen Wettbewerb stehenden Anbietern, die über den gesamten Fahrzeuglebenszyklus Dienstleistungen und Komponenten entsprechend der offenen Schnittstellen aktiv für den Plattformbetreiber, später jedoch auch direkt für den Endkunden, zur Verfügung stellen können. Darüber hinaus ermöglichen offene Schnittstellen auch für bislang unbeteiligte Akteure wie Start-ups oder Entwicklercommunities einen Marktzugang. In diesem Zusammenhang verschiebt sich die Rolle des heutigen OEMs weg vom Integrator hin zum Plattformentwickler, -anbieter und -betreiber, welcher in diesem Rahmen die Verantwortung für die Gewährleistung von Security und Safety sowie für die Gesamtprodukteigenschaften trägt.
Der Fokus des Verbundprojekts FlexCAR liegt auf der Entwicklung einer offenen kooperativen Fahrzeugplattform für die Mobilität der Zukunft. Das Konzept hebt sich dabei von bisherigen Plattformkonzepten durch die (vollständige) Öffnung und Zugänglichmachung aller Soft- und Hardwareschnittstellen für Anbieter ab. Dies löst starre Produktstrukturen ebenso auf wie die heute entlang der Zuliefererkette bestehenden Hierarchien, wandelt die Rolle der heutigen Akteure und ermöglicht neue Geschäftsmodelle. Die offene Plattform FlexCAR macht den Weg frei für eine Öffnung des Marktzugangs und für die Dezentralisierung von Innovationstätigkeiten sowie für die Flexibilisierung von Entwicklungszyklen und eine verbesserte Ausschöpfung der Kompetenzen des Wertschöpfungsnetzwerks.
Das Ziel ist ein vollständig neues, hinsichtlich individueller Kunden- und Betreiberbedürfnisse flexibles Fahrzeugkonzept als offene Entwicklungsplattform. Dieses umfasst die permanente, dezentrale Weiterentwicklung der Fahrzeugkonfiguration und der relevanten Systeme, eine zielführende Update- und Upgradefähigkeit der hieraus entstehenden Fahrzeuge sowie die Wieder- und Weiterverwendbarkeit von Fahrzeugkomponenten und eine teilweise Auflösung des klassischen Lebenszyklus. Um die Machbarkeit des Konzeptes aufzeigen zu können, besetzt das Verbundprojekt FlexCAR die offenen Schnittstellenfragen im Laufe der Projektdauer anhand typischer Fahrzeugumfänge. Diese Fahrzeugumfänge umfassen dabei die Entwicklung einzelner, zukunftsweisender Komponenten in einem exemplarischen, verkleinerten Innovationsnetzwerk und deren Nutzung in einem Fahrzeugdemonstrator.
Projektförderung: BMBF (Bundesministerium für Bildung und Forschung)
Weitere Informationen unter
https://www.arena2036.de/de/flexcar
Abgeschlossene Forschungsprojekte
DiaMANT.Gefördert durch: Ministerium für Verkehr Baden-Württemberg
Projektpartner:
Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart - FKFS - Stadt Stuttgart - Stadt Ludwigsburg (Konsortialführer) - Technische Akademie Schwäbisch Gmünd - Stuttgarter Straßenbahnen AG (SSB) - Daimler AG - EvoBus GmbH
Ansprechpartner:
Lehrstuhl Kraftfahrzeugmechatronik
Herr Prof. Dr.-Ing. H.-C. Reuss
Telefon +49 711 685-65743
Projektinhalte
Roadshow in Baden-Württemberg zwecks Erklärung der Technik - Vorträge, Präsentationen, Experimente zum Anfassen und Verstehen der Technik. - Gespräche mit den Besucherinnen und Besuchern über das automatisiete, vernetzte und elektrische Fahren: Chancen, Risiken, Hoffnungen, eigene Erfahrungen. AP 2: Automatisierter Werksverkehr in einem Busdepot - Automatisieren von wiederkehrenden Betriebsfahrten. - Untersuchen der notwendigen technischen Maßnahmen und der Auswirkungen auf den Betriebsablauf. AP 3: Demonstrationsbetrieb eines automatisierten Shuttles in Ludwigburg - Automatisiertes Shuttle zur Anbindung des Bahnhofs an ein Industriegebiet. - Möglichkeit, den Betrieb eines solchen Fahrzeugs zu erleben. - Demonstrationsbetrieb, kein Linienbetrieb. - Begleitforschung: Befragung der Fahrgäste. Kernziele des Vorhabens sind - Technik des automatisierten, vernetzten und elektrischen Fahrens der Bevölkerung näher bringen. - Dialog mit den Menschen: Was erwarten sie? Was befürchten/erhoffen sie? Was glauben sie, zu wissen? - Technik erlebbar und anfassbar machen.
Projektförderung: Fördermittelgeber Ministerium für Verkehr Baden-Württemberg
Die Promotion als Karrieresprungbrett in Industrie, Wirtschaft und Forschung!
Ihr Ansprechpartner

Dan Greiner
Dr.-Ing.Projektleitung und Lehre automatisiertes und vernetztes Fahren
[Foto: Dan Greiner]

Thomas Riemer
Dr.-Ing.Bereichsleiter AM 3 - Mobilität
[Foto: Thomas Riemer]